
















-
1. 官方支持内容
-
1.1 T800 模型资源
-
1.2 专业拳击动作数据集
-
1.3 开源基础代码
-
-
二、选手提交内容要求
-
2.1 视频材料
-
2.2 策略与配置
-
2.3 其他补充材料
-
-
三、说明事项
-
四、免责说明
1. 官方支持内容
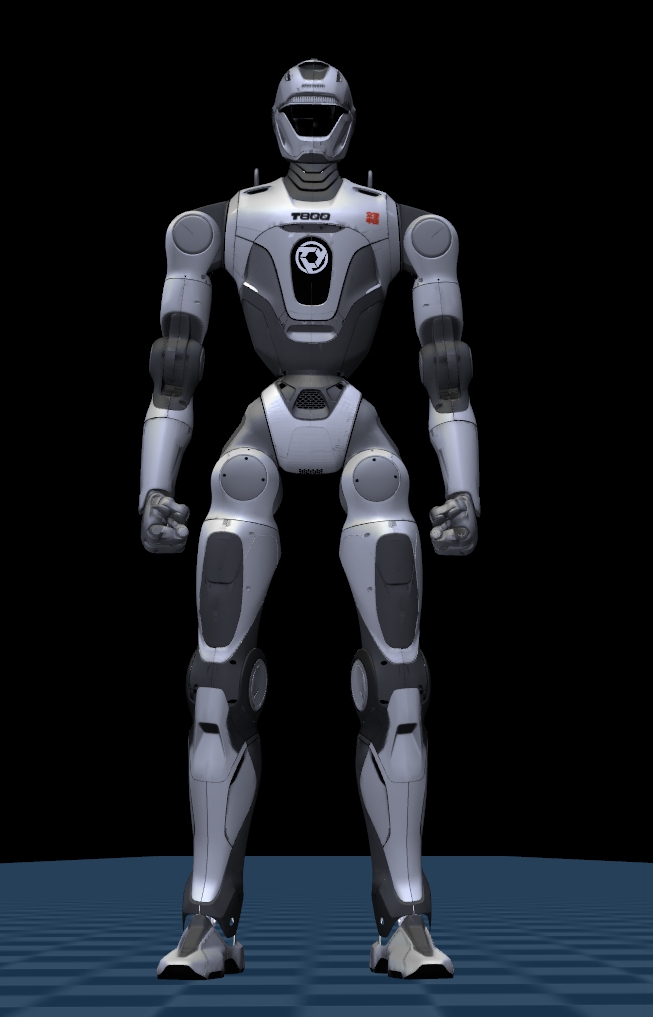
1.1 T800 模型资源
官方将提供完整的 T800 机器人结构模型,包括:
URDF 文件:包含关节定义、运动约束及基础结构说明
Mesh 文件:用于可视化与仿真渲染
XML 文件:用于仿真环境配置(MuJoCo 兼容)

-540回旋踢
(2)T800 重映射动作数据(30Hz)
格式:NPY
数据结构:
3维:base_pos
4维:base_quat(wxyz)
25维:joint_pos
包含动作示例:
-左摆拳
- 回身拳
1.3 开源基础代码
官方提供完整基础开发框架,包含:
(1)训练代码
模仿学习(Imitation Learning)基础示例
数据加载与处理流程
基础策略训练脚本
(2)部署代码
基于 MuJoCo 的仿真环境部署
推理与策略执行示例
二、选手提交内容要求
2.2 策略与配置
训练完成的策略模型
对应配置文件(含参数说明)
2.3 其他补充材料
如对官方 runner 或基础框架进行了修改,需:
提交完整可运行代码
明确标注修改内容
三、说明事项
所有提交内容需确保可复现性与完整性。
请严格基于官方提供接口与模型结构进行开发。
若涉及自定义模块,请确保不影响评测环境正常运行。
四、免责说明
本次赛事对外公开的模型、数据、代码及相关文件仅限本次赛事使用,严禁用于暴力、危险、违法及非赛事用途。
凡参与本次赛事,即视为已阅读并同意本声明,本次赛事所有相关事宜最终解释权归众擎所有。
